SAFEPED Helps Cities Fix Dangerous Intersections
Traffic planners and engineers worry about “black spots” — intersections that experience a high incidence of traffic accidents. But when it comes to designing safer roads, they lack effective tools to determine what turns a junction into a danger zone for cars and pedestrians alike.
Now Ph.D. student Gennady Waizman of Tel Aviv University’s Geosimulation Lab at the Department of Geography and the Human Environment and Porter School of Environmental Science has developed SAFEPED, a computer simulation that integrates robotics and statistics on driver and pedestrian behavior to determine the environmental features which lead to these black spots. Based on real-world data, SAFEPED is more true-to-life than other computer traffic models.
SAFEPED allows traffic planners and engineers to analyze and fix dangerous intersections. It also permits these engineers to test and rearrange the architecture of a planned junction and design it for optimal safety. The model has been presented at the Transportation Research Board Conference on Safety and Mobility in Jerusalem, and this July at the Geocomputation 2011 conference in London.
Countdown to collision
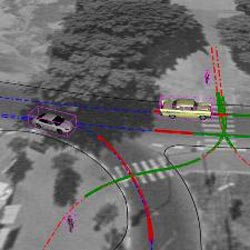
SAFEPED considers each car and pedestrian an autonomous “agent,” with the ability to reason and react based on its individual predictions of how surrounding agents will behave. This is a significant improvement on other computer models of traffic, which do not account for the human ability to see the world in three dimensions, predict the actions of others, and react accordingly.
“Because drivers and pedestrians behave according to the same habits and rules at any intersection they approach,” Waizman explains, “we presumed that the problem lay in the environment. With this program, we can model a real intersection in the simulator, and make modifications to the environment or traffic regulations to see how they impact the safety of the junction.”
But the researchers knew that it was not enough to place traditional robotic agents into the environment. Such non-thinking robots could not give them an accurate indication of how a changed traffic architecture could affect accident rates. Instead, Waizman’s team based their simulator on a theory of visual perception developed by the cognitive scientist James J. Gibson. When humans move through a given environment, Gibson theorized, they analyze their “optic flow” as they move, taking into account their anticipated time of collision with other objects or people.
Averting a crash before it happens
In SAFEPED, all agents move and think individually, and they determine their actions based on visibility and the movement of the other agents. Depending on what they perceive and predict, agents slow down, accelerate, or divert. The researchers can see an accident from the viewpoint of any agent to determine where visibility was impaired or an agent made a wrong decision. They can also rewind a virtual accident and determine if a change in regulations or architecture could have averted the crash.
The agents’ behavior is based on traffic statistics provided by the Israeli police force and on hours of observation by M.A. student Eilon Blank-Baron, who recorded videos of intersections, analyzed the behavior of the moving drivers and pedestrians, and integrated the resulting data into SAFEPED to make the simulator more realistic. Two synchronized cameras observed how cars and pedestrians reacted to one another.
The SAFEPED research has already led to many important findings. The probability that pedestrians will cross a busy road, for example, is based on how they estimate the velocity of an approaching car. If they believe the car will cross the intersection in less than 2.5 seconds, people will not cross. At 5.5 or 6 seconds, however, most people will cross the road. It also found that the further back a white stop line is set in an intersection, the smaller the chance that a pedestrian will be struck by a car.
Waizman’s and Blank-Baron’s research is supervised by Prof. Itzhak Benenson of TAU’s Department of Geography and Human Environment and Prof. Shraga Shoval of the Ariel University Center.
Media Contact
All latest news from the category: Transportation and Logistics
This field deals with all spatial and time-related activities involved in bridging the gap between goods and people, including their restructuring. This begins with the supplier and follows each stage of the operational value chain to product delivery and concludes with product disposal and recycling.
innovations-report provides informative reports and articles on such topics as traffic telematics, toll collection, traffic management systems, route planning, high-speed rail (Transrapid), traffic infrastructures, air safety, transport technologies, transport logistics, production logistics and mobility.




Newest articles
High-energy-density aqueous battery based on halogen multi-electron transfer
Traditional non-aqueous lithium-ion batteries have a high energy density, but their safety is compromised due to the flammable organic electrolytes they utilize. Aqueous batteries use water as the solvent for…

First-ever combined heart pump and pig kidney transplant
…gives new hope to patient with terminal illness. Surgeons at NYU Langone Health performed the first-ever combined mechanical heart pump and gene-edited pig kidney transplant surgery in a 54-year-old woman…
Biophysics: Testing how well biomarkers work
LMU researchers have developed a method to determine how reliably target proteins can be labeled using super-resolution fluorescence microscopy. Modern microscopy techniques make it possible to examine the inner workings…

