Advancing trajectory tracking control of pneumatic artificial muscle-based systems
PAM technology has widespread applicability in various industries. But precise tracking of the PAM-based’s systems parameters is crucial and yet challenging for traditional control methods. The adaptive fuzzy sliding mode control (AFSMC) for PAM-based systems proposed by researchers from Japan exhibits enhanced controller performance and remarkable adaptability to sudden external disturbances, swiftly returning to the original trajectory through manipulation of its control output.
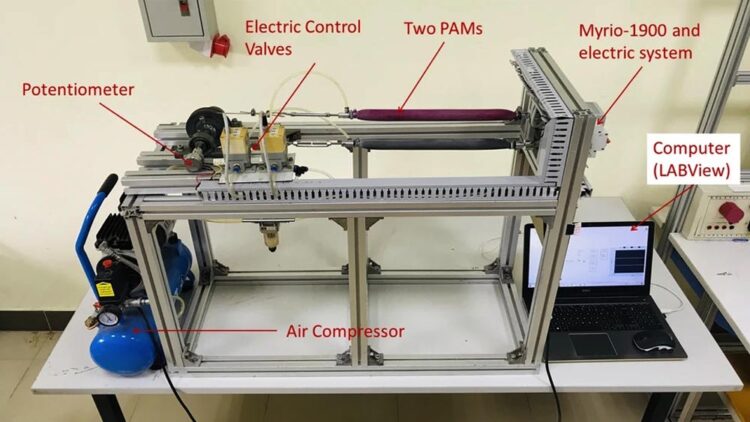
Credit: Ngoc-Tam BUI from SIT, Japan Image Link: https://www.nature.com/articles/s41598-023-34491-3
Researchers from Japan and Vietnam develop a new approach that utilizes fuzzy logic to estimate unknown parameters and control nonlinear pneumatic artificial muscles.
In recent years, pneumatic artificial muscles (PAMs) have emerged as promising actuators for simulating human-like movements, with prominent applications in various industries including robotics, rehabilitation, and prosthetics. PAMs are usually composed of rubber and covered with braided yarn and can mimic the mechanics of human muscles. They can stiffen and contract on being supplied with pressurized air and soften and lengthen upon releasing the air. However, PAM is a nonlinear system and experiences huge latency, making it important to have control systems that can regulate their performance.
While determining a nonlinear mathematical model for PAM is challenging, researchers in the past have proposed many control methods to solve the problems associated with PAM. However, while these traditional control methods exhibit decent performance, they are not able to deal with PAM’s nonlinearity and hysteresis. Moreover, while learning control algorithms have been theoretically effective in improving PAM-based system’s performance, their implementation is practice is quite difficult.
To overcome these limitations and address this open problem, a group of researchers led by Associate Professor Ngoc-Tam BUI of the Innovative Global Program, College of Engineering, Shibaura Institute of Technology in Japan, along with Dr. Quy-Thinh Dao of Hanoi University of Science and Technology, has proposed a novel solution. In their study published in the journal Scientific Reports on 22 May 2023, they propose a control approach called “adaptive fuzzy sliding mode controller (or AFSMC)” that uses fuzzy logic (a type of computational thinking) for estimating control parameters of PAM-based systems.
“The proposed innovative control strategy leverages the Takagi–Sugeno fuzzy algorithm to estimate the disturbance component and automatically update the output variable values, demonstrating enhanced tracking accuracy and adaptability compared to traditional sliding mode control methods,” explains Associate Professor BUI.
The researchers first developed a sliding mode controller with a control signal that incorporates a special variable to estimate the disturbances and improve the control performance. Next, they designed an adaptive fuzzy algorithm, wherein parameter vectors of the component rules are automatically updated by an adaptive law, to compute the disturbance variable. The stability of the developed ASFMC algorithm was then analyzed using the Lyapunov stability condition (used to study the stability of a nonlinear system). Furthermore, the researchers conducted a series of experiments to assess the performance of their controller by comparing it with traditional sliding mode control methods.
Remarkably, the AFSMC approach exhibited improved tracking accuracy, with a root mean square error value of 2.68° at a frequency of 0.5 Hz under load, while the sliding mode controller approach displayed a higher value of 4.21°. Moreover, it showed exceptional adaptability to abrupt external disturbances. Explaining these results further, Associate Professor BUI says, “In a comparative evaluation against the well-known commercial rehabilitation system, LOKOMAT, the AFSMC controller delivered similar performance. It also exhibited superior adaptability to sudden load changes, swiftly returning to the desired trajectory by manipulating its control output.”
These findings thus point to the potential of the novel AFSMC approach for integration into robotic rehabilitation devices, assistive devices, and physical therapy equipment for precise and personalized therapy. Moreover, this approach can aid in the design and development of advanced prosthetic limbs for enhanced functionality and rehabilitation outcomes.
Talking about the long-term implications of this study, Associate Professor BUI says: “With the outcomes of this research, the emergence of a commercial rehabilitation system actuated by PAM can be anticipated within the next 5 to 10 years. This innovative system will provide significant benefits to patients, including those with spinal cord injuries and stroke and others requiring rehabilitation.”
While this research has laid the groundwork for advancing trajectory tracking control in PAM systems, we hope that it ignites further exploration and development in the field of rehabilitation technology.
Reference
Title of original paper: Adaptive fuzzy sliding mode control of an actuator powered by two opposing pneumatic artificial muscles
Journal: Scientific Reports
DOI: https://doi.org/10.1038/s41598-023-34491-3
About Shibaura Institute of Technology (SIT), Japan
Shibaura Institute of Technology (SIT) is a private university with campuses in Tokyo and Saitama. Since the establishment of its predecessor, Tokyo Higher School of Industry and Commerce, in 1927, it has maintained “learning through practice” as its philosophy in the education of engineers. SIT was the only private science and engineering university selected for the Top Global University Project sponsored by the Ministry of Education, Culture, Sports, Science and Technology and will receive support from the ministry for 10 years starting from the 2014 academic year. Its motto, “Nurturing engineers who learn from society and contribute to society,” reflects its mission of fostering scientists and engineers who can contribute to the sustainable growth of the world by exposing their over 8,000 students to culturally diverse environments, where they learn to cope, collaborate, and relate with fellow students from around the world.
Website: https://www.shibaura-it.ac.jp/en/
About Associate Professor Ngoc-Tam BUI from SIT, Japan
Ngoc-Tam BUI is an Associate Professor at the Innovative Global Program, College of Engineering at Shibaura Institute of Technology in Japan. He obtained the Bachelor of Engineering degree in Mechanical Engineering from Hanoi University of Science and Technology (HUST) in 2008 and completed his master’s and Ph.D. degrees, specializing in engineering optimization, from the Shibaura Institute of Technology in 2012 and 2015, respectively. His research interests encompass engineering optimization, optimization design, and manufacturing technology. He has published close to 50 research papers spanning areas of his research interest.
Funding Information
This study was funded by the Hanoi University of Science and Technology (HUST) under project number T2022-PC-002.
Journal: Scientific Reports
DOI: 10.1038/s41598-023-34491-3
Method of Research: Experimental study
Subject of Research: Not applicable
Article Title: Adaptive fuzzy sliding mode control of an actuator powered by two opposing pneumatic artificial muscles
Article Publication Date: 22-May-2023
COI Statement: The authors declare no competing interests.
Media Contact
Yu Wang
Shibaura Institute of Technology
koho@ow.shibaura-it.ac.jp
Office: 81-367-222-900
All latest news from the category: Machine Engineering
Machine engineering is one of Germany’s key industries. The importance of this segment has led to the creation of new university degree programs in fields such as production and logistics, process engineering, vehicle/automotive engineering, production engineering and aerospace engineering among others.
innovations-report offers informative reports and articles covering technologies such as automation, motion, power train, energy, conveyor, plastics, lightweight construction, logistics/warehousing, measurement systems, machine tools and control engineering.




Newest articles

Faster, more energy-efficient way to manufacture an industrially important chemical
Zirconium combined with silicon nitride enhances the conversion of propane — present in natural gas — needed to create in-demand plastic, polypropylene. Polypropylene is a common type of plastic found…

Energy planning in Ghana as a role model for the world
Improving the resilience of energy systems in the Global South. What criteria should we use to better plan for resilient energy systems? How do socio-economic, technical and climate change related…

Artificial blood vessels could improve heart bypass outcomes
Artificial blood vessels could improve heart bypass outcomes. 3D-printed blood vessels, which closely mimic the properties of human veins, could transform the treatment of cardiovascular diseases. Strong, flexible, gel-like tubes…

