Thermal-Powered, Insectlike Robot Crawls Into Microrobot Contenders’ Ring
The past few years have given rise to a growing number of microrobots, miniaturized mobile machines designed to perform specific tasks. And though spectators might need magnifying glasses to see the action, some think the time has come for a microrobotics challenge.
“I’d like to see a similar competition at the small scale, where we dump these microrobots from a plane and have them go off and run for days and just do what they’ve been told,” said Karl Böhringer, a University of Washington professor of electrical engineering. “That would require quite an effort at this point, but I think it would be a great thing.”
Researchers at the UW and Stanford University have developed what might one day be a pint-sized contender. Böhringer is lead author of a paper in the June issue of the Journal of Microelectromechanical Systems introducing an insectlike robot with hundreds of tiny legs.
Compared to other such robots, the UW model excels in its ability to carry heavy loads – more than seven times its own weight – and move in any direction.
Someday, tiny mobile devices could crawl through cracks to explore collapsed structures, collect environmental samples or do other tasks where small size is a benefit. The UW’s robot weighs half a gram (roughly one-hundredth of an ounce), measures about 1 inch long by a third of an inch wide, and is about the thickness of a fingernail.
Technically it is a centipede, with 512 feet arranged in 128 sets of four. Each foot consists of an electrical wire sandwiched between two different materials, one of which expands under heat more than the other. A current traveling through the wire heats the two materials and one side expands, making the foot curl. Rows of feet shuffle along in this way at 20 to 30 times each second.
“The response time is an interesting point about these tiny devices,” Böhringer said. “On your stove, it might take minutes or even tens of minutes to heat something up. But on the small scale it happens much, much faster.”
The legs’ surface area is so large compared to their volume that they can heat up or cool down in just 20 milliseconds.
“It’s one of the strongest actuators that you can get at the small scale, and it has one of the largest ranges of motion,” Böhringer said. “That’s difficult to achieve at the small scale.”
The microchip, the robot’s body and feet, was first built in the mid 1990s at Stanford University as a prototype for part of a paper-thin scanner or printer. A few years later the researchers modified it as a docking system for space satellites. Now they have flipped it over so the structures that acted like moving cilia are on the bottom, turning the chip into an insectlike robot.
“There were questions about the strength of the actuators. Will they be able to support the weight of the device?” Böhringer said. “We were surprised how strong they were. For these things that look fragile, it’s quite amazing.”
The tiny legs can move more than just the device. Researchers were able to pile paper clips onto the robot’s back until it was carrying more than seven times its own weight. This means that the robot could carry a battery and a circuit board, which would make it fully independent. (It now attaches to nine threadlike wires that transmit power and instructions.)
Limbs pointing in four directions allow the robot flexibility of movement.
“If you drive a car and you want to be able to park it in a tight spot, you think, ‘Wouldn’t it be nice if I could drive in sideways,’” Böhringer said. “Our robot can do that – there’s no preferred direction.”
Maneuverability is important for a robot intended to go into tight spaces.
The chip was not designed to be a microrobot, so little effort was made to minimize its weight or energy consumption. Modifications could probably take off 90 percent of the robot’s weight, Böhringer said, and eliminate a significant fraction of its power needs.
As with other devices of this type, he added, a major challenge is the power supply. A battery would only let the robot run for 10 minutes, while researchers would like it to go for days.
Another is speed. Right now the UW robot moves at about 3 feet per hour – and it’s far from the slowest in the microrobot pack.
Co-authors are former UW graduate students Yegan Erdem, Yu-Ming Chen and Matthew Mohebbi; UW electrical engineering professor Robert Darling; John Suh at General Motors; and Gregory Kovacs at Stanford.
Research funding was provided by the U.S. Defense Advanced Research Projects Agency, the National Science Foundation and General Motors Co.
For more information, contact Böhringer at 206-221-5177 or karl@ee.washington.edu.
More information on the research is at www.tinyurl.com/uw_microrobot.
The article includes a table comparing published data on 10 microrobots.
Media Contact
More Information:
http://www.uw.eduAll latest news from the category: Interdisciplinary Research
News and developments from the field of interdisciplinary research.
Among other topics, you can find stimulating reports and articles related to microsystems, emotions research, futures research and stratospheric research.




Newest articles
High-energy-density aqueous battery based on halogen multi-electron transfer
Traditional non-aqueous lithium-ion batteries have a high energy density, but their safety is compromised due to the flammable organic electrolytes they utilize. Aqueous batteries use water as the solvent for…

First-ever combined heart pump and pig kidney transplant
…gives new hope to patient with terminal illness. Surgeons at NYU Langone Health performed the first-ever combined mechanical heart pump and gene-edited pig kidney transplant surgery in a 54-year-old woman…
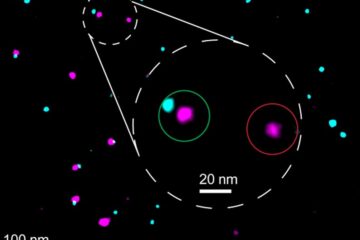
Biophysics: Testing how well biomarkers work
LMU researchers have developed a method to determine how reliably target proteins can be labeled using super-resolution fluorescence microscopy. Modern microscopy techniques make it possible to examine the inner workings…

