











Feeding 9 Billion: Innovations in Agricultural Modeling
The new concept, which is based on the parallel configuration of the robot's joints (“parallel robots”), is modular and easy to scale and has the inherent benefit of very low inertia of the moving robot parts.
This, together with high stiffness of joints and arms, makes it possible to build high-performance robots with respect to accuracy, speed, stiffness and mechanical bandwidth. A material removal prototype for fettling steel castings in small and medium-sized foundries will be demonstrated at AUTOMATICA 2008.
Force sensors are used for interactive intuitive calibration and programming as well as for process control. To demonstrate the modularity and scalability of the robot, a smaller desktop version of the robot will also be displayed.
* Responsible contact person:
Torgny Brogardh /ABB Robotics
Phone: +46 21 344391
Fax: +46 21 132 592
E-mail : torgny.brogardh@se.abb.com
* Substitute contact person:
Walter Zulauf / Güdel AG
Phone: +41 62 916-9214
Fax: +41 62 916-9150
E-mail: walter.zulauf@ch.guedel.com

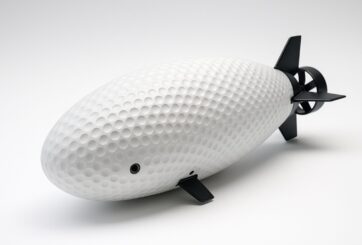
A spherical prototype that can change its surface from smooth to dimpled cuts through drag and generates lift Captions // Photos on Flickr // Video on Youtube Underwater or aerial vehicles with dimples like golf balls could be more efficient and maneuverable, a new prototype developed at the University of Michigan has demonstrated. Golf ball dimples cut through pressure drag—the resistance force an object meets when moving through a fluid—propelling the ball 30% further than a smooth ball on average….

In industrial stamping processes, several hundred sheet metal parts are typically produced per minute. Together with the stamped parts manufacturer Quittenbaum GmbH, researchers at Fraunhofer IPM have now for the first time developed and installed an optical inspection system that checks the dimensional accuracy of every single component in high-speed stamping processes – with an accuracy in the range of 100 micrometers. The geometric deviations are depicted in 16 different views on the user interface. © Fraunhofer IPM Connectors, sleeves…
A team of researchers has beaten its own record for the fastest swimming soft robot, drawing inspiration from manta rays to improve their ability to control the robot’s movement in the water. “Two years ago, we demonstrated an aquatic soft robot that was able to reach average speeds of 3.74 body lengths per second,” says Jie Yin, corresponding author of a paper on the work and an associate professor of mechanical and aerospace engineering at North Carolina State University. “We…
Detonation is a supersonic combustion wave, characterized by a shock wave driven by the energy release from closely coupled chemical reactions. It is a typical form of pressure gain combustion, converting chemical energy into thrust efficiently. The concept of harnessing detonation to improve thermodynamic cycle efficiency and enhance the performance of aerospace propulsion systems has been a subject of interest for many years. Since the 1950s, various types of detonation engines have been proposed, including pulse detonation engines, oblique detonation…
