Expanding the ability of robots to learn from videos
A team from Carnegie Mellon University’s Robotics Institute used affordances to teach robots how to interact with objects.
Credit: Carnegie Mellon University
Robots able to accomplish tasks after watching people perform them in any environment.
New work from Carnegie Mellon University has enabled robots to learn household chores by watching videos of people performing everyday tasks in their homes.
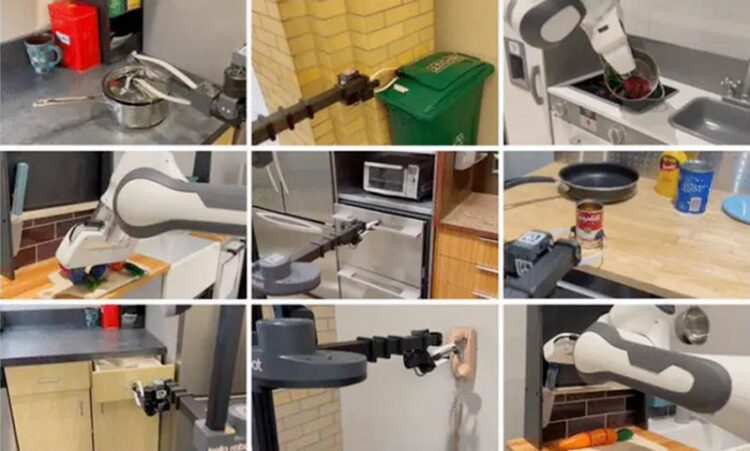
The research could help improve the utility of robots in the home, allowing them to assist people with tasks like cooking and cleaning. Two robots successfully learned 12 tasks including opening a drawer, oven door and lid; taking a pot off the stove; and picking up a telephone, vegetable or can of soup.
“The robot can learn where and how humans interact with different objects through watching videos,” said Deepak Pathak, an assistant professor in the Robotics Institute at CMU’s School of Computer Science. “From this knowledge, we can train a model that enables two robots to complete similar tasks in varied environments.”
Current methods of training robots require either the manual demonstration of tasks by humans or extensive training in a simulated environment. Both are time consuming and prone to failure. Past research by Pathak and his students demonstrated a novel method in which robots learn from observing humans complete tasks. However, WHIRL, short for In-the-Wild Human Imitating Robot Learning, required the human to complete the task in the same environment as the robot.
Pathak’s latest work, Vision-Robotics Bridge, or VRB for short, builds on and improves WHIRL. The new model eliminates the necessity of human demonstrations as well as the need for the robot to operate within an identical environment. Like WHIRL, the robot still requires practice to master a task. The team’s research showed it can learn a new task in as little as 25 minutes.
“We were able to take robots around campus and do all sorts of tasks,” said Shikhar Bahl, a Ph.D. student in robotics. “Robots can use this model to curiously explore the world around them. Instead of just flailing its arms, a robot can be more direct with how it interacts.”
To teach the robot how to interact with an object, the team applied the concept of affordances. Affordances have their roots in psychology and refer to what an environment offers an individual. The concept has been extended to design and human-computer interaction to refer to potential actions perceived by an individual.
For VRB, affordances define where and how a robot might interact with an object based on human behavior. For example, as a robot watches a human open a drawer, it identifies the contact points — the handle — and the direction of the drawer’s movement — straight out from the starting location. After watching several videos of humans opening drawers, the robot can determine how to open any drawer.
The team used videos from large datasets such as Ego4D and Epic Kitchens. Ego4D has nearly 4,000 hours of egocentric videos of daily activities from across the world. Researchers at CMU helped collect some of these videos. Epic Kitchens features similar videos capturing cooking, cleaning and other kitchen tasks. Both datasets are intended to help train computer vision models.
“We are using these datasets in a new and different way,” Bahl said. “This work could enable robots to learn from the vast amount of internet and YouTube videos available.”
More information is available on the project’s website and in a paper presented in June at the Conference on Vision and Pattern Recognition.
Media Contact
Aaron Aupperlee
Carnegie Mellon University
aaupperlee@cmu.edu
Office: 412-268-9068
Original Source
All latest news from the category: Information Technology
Here you can find a summary of innovations in the fields of information and data processing and up-to-date developments on IT equipment and hardware.
This area covers topics such as IT services, IT architectures, IT management and telecommunications.




Newest articles

Webb captures top of iconic horsehead nebula in unprecedented detail
NASA’s James Webb Space Telescope has captured the sharpest infrared images to date of a zoomed-in portion of one of the most distinctive objects in our skies, the Horsehead Nebula….
Cost-effective, high-capacity, and cyclable lithium-ion battery cathodes
Charge-recharge cycling of lithium-superrich iron oxide, a cost-effective and high-capacity cathode for new-generation lithium-ion batteries, can be greatly improved by doping with readily available mineral elements. The energy capacity and…

Novel genetic plant regeneration approach
…without the application of phytohormones. Researchers develop a novel plant regeneration approach by modulating the expression of genes that control plant cell differentiation. For ages now, plants have been the…

