Search-And-Rescue Robots Practice Emergency Response to Simulated Earthquake
Researchers see how robots respond in real-world rescue operations with FEMA’s Indiana Task Force 1
An earthquake has just laid waste to a small town. Major roads are impassable, and downed trees have cut power. Worse yet, the local library collapsed during the sudden temblor, trapping a half-dozen patrons. The robots are rushed in to help locate and free the survivors.
That was the scenario facing a group of 14 researchers and a crew of search-and-rescue robots as they embarked on an arduous 26hour field exercise in Lebanon, Indiana, alongside professional emergency response personnel. The exercise was designed to elicit research issues and practical matters that robot developers might overlook or take for granted, such as the special requirements for maneuvering a robot with only a robot’s eye view, the need to operate the robot while wearing safety gloves, working while exhausted and designing controls that can be mastered with a week, not months, of training.
“Until you experience a rescue operation, it’s hard to understand the real research questions that must be addressed for this technology to be transferred to search-and-rescue users,” said Robin Murphy, director of the Center for Robot-Assisted Search and Rescue (CRASAR) at the University of South Florida.
CRASAR and Indiana Task Force 1, one of 28 urban search-andrescue task forces established by the Federal Emergency Management Agency (FEMA), organized the training exercise with support from the National Science Foundation (NSF), the independent federal agency that supports fundamental research and education across all fields of science and engineering. The exercise participants included mechanical and electrical engineers, computer scientists, cognitive psychologists and organizational scientists. v “We’re using the same search tools we’ve used for 15 years-the robots are going to change that,” said Lt. David Hatter, an Indiana Task Force search team manager, at a briefing to the technical search team before the exercise.
“The importance of this exercise and others like it is to evaluate the equipment before we have to use it in a real disaster,” said Sam Stover, the technical search expert with the Indiana Task Force and the director of operations for CRASAR’s search-and-rescue team. “Nine-eleven brought a whole new reality to our country.”
To simulate the earthquake’s aftermath, the task force partially demolished the former town library in Lebanon, about 25 miles from Indianapolis, where the task force is based. After the hazardous materials team gave the “all clear,” the task force members executed their disaster deployment procedures to rescue the six mannequin victims.
Working alongside the human task force members, the CRASAR and exercise participants brought several “man-packable platforms”-search-and-rescue lingo for robots carried to the scene strapped to the back of a human operator. The robots were equipped with instruments including infrared cameras, night vision sensors and millimeter-wave radar. The exercise gave the researchers a chance to try out sensors and robots, collect performance data and put a real-world face on what would otherwise be hypothetical situations.
In one scenario, CRASAR graduate student Jennifer Carlson lowered a robot into a damaged basement. She successfully found the victim, but the process took longer than she expected, Carlson said, because she quickly lost track of her robot’s exact location. The camera’s limited field of view cuts out cues that the human mind uses to keep a sense of one’s surroundings. In addition, an adult is typically not used to the floor-level vantage point from a shoebox-sized robot, which makes everything appear larger.
Carlson’s difficulty showed that research is needed on the information the robot should provide about its position and orientation. A person just knows which direction her eyes are looking, but a robot operator faces the added task of remembering whether the robot and the robot’s camera are pointing up, down, left or right. This unnatural effort contributes to disorientation, particularly in high-stress situations, like search-and-rescue operations.
At the same time, CRASAR is learning that the robots don’t need to be autonomous; they just need to be able to respond to one or two simple commands and to give a signal. “That’s a fundamental change in how we think about the robots,” Murphy said. “There’s a lot of research yet to be done that will have an impact outside the search-and-rescue community about how we interact with technology.”
CRASAR maintains a self-sufficient response team with a cache of robots ready for rapid deployment within four hours nationally and internationally and is the only international response team specializing in rescue robots recognized by the United Nations. CRASAR’s robots faced their first major test in the days following the collapse of the World Trade Center towers, extending the senses of the rescue workers into areas that personnel and dogs couldn’t go. In December 2002, CRASAR conducted the first use of rescue robots in a joint international exercise in Johannesburg, South Africa.
To accelerate the pace at which research advances are transferred to emergency responders, NSF is also supporting CRASAR in establishing an Industry-University Cooperative Research Center at the University of South Florida, in partnership with the University of Minnesota and other universities on Safety, Security and Rescue Robotics.
“My hope is that in five years, when you see a disaster or earthquake on television, you immediately know what you’re going to see,” Murphy said. “You’re going to see people in FEMA hard hats, you’re going to see dogs and you’re going to see robots. You’re just going to expect a rescue to have robots. It’s going to be that standard.”
Media Contact
All latest news from the category: Earth Sciences
Earth Sciences (also referred to as Geosciences), which deals with basic issues surrounding our planet, plays a vital role in the area of energy and raw materials supply.
Earth Sciences comprises subjects such as geology, geography, geological informatics, paleontology, mineralogy, petrography, crystallography, geophysics, geodesy, glaciology, cartography, photogrammetry, meteorology and seismology, early-warning systems, earthquake research and polar research.




Newest articles
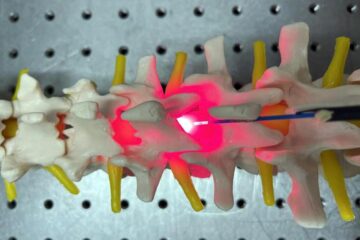
Red light therapy for repairing spinal cord injury passes milestone
Patients with spinal cord injury (SCI) could benefit from a future treatment to repair nerve connections using red and near-infrared light. The method, invented by scientists at the University of…
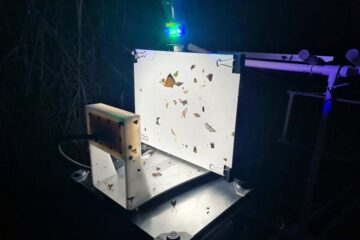
Insect research is revolutionized by technology
New technologies can revolutionise insect research and environmental monitoring. By using DNA, images, sounds and flight patterns analysed by AI, it’s possible to gain new insights into the world of…

X-ray satellite XMM-newton sees ‘space clover’ in a new light
Astronomers have discovered enormous circular radio features of unknown origin around some galaxies. Now, new observations of one dubbed the Cloverleaf suggest it was created by clashing groups of galaxies….

