










Feeding 9 Billion: Innovations in Agricultural Modeling
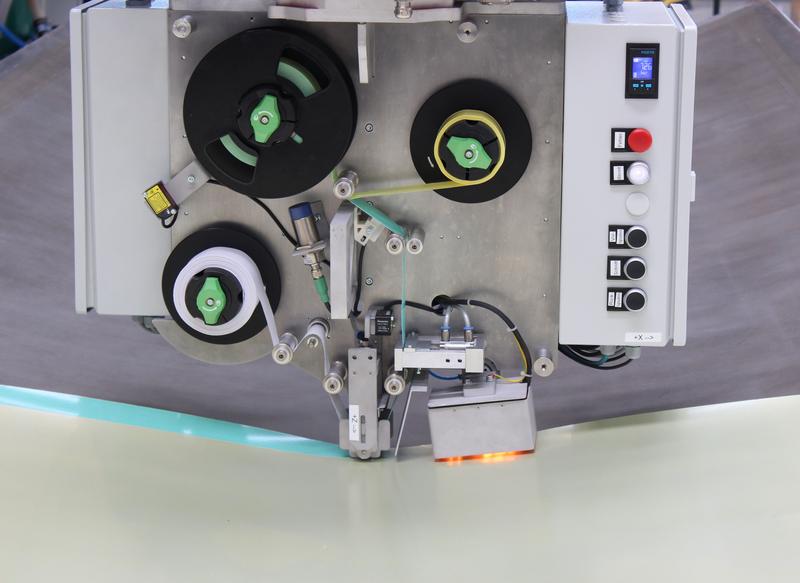
The adhesive film end effector developed by the experts for Automation and Production Technology at Fraunhofer IFAM during an automated adhesive film placement.
© Fraunhofer IFAM
Automation is a key strategy for combating production bottlenecks in the aircraft manufacturing industry. The newly developed end effectors are designed for standard industrial robots for automated adhesive film placement and stringer integration in the manufacture of aircraft fuselages.
These end effectors not only increase the production rate with no loss of quality but also lower the production costs. The current manual procedure also requires more process steps to achieve the same result.
The automation solutions developed in the „NFM-Glare” sub-project by the experts for Automation and Production Technology at the Fraunhofer Institute for Manufacturing Technology and Advanced Materials IFAM in Stade exceed Technology Readiness Level 5 (TRL 5).
This means that the technologies have already been validated in a manufacturing environment at near-production speeds on approximately 2 x 6 meter prototypes.
Structure of components made of fiber metal laminates (FMLs)
FML components consist of aluminum sheets of 0.3 or 0.4 millimeters thickness alternating with glass fiber prepreg layers. These multiple layers create barriers that suppress crack propagation and hence give rise to components having greater resistance to damage.
The manufacture of FML components requires the placement of adhesive film strips that connect the aluminum sheets with each other. In the project, double-sided adhesive strips were automatically placed on metal sheets with the adhesive film end effector. This was carried out to join the sheets together and also to secure the longitudinal stiffening elements (stringers) after they had been positioned on the fuselage section by two cooperating robots.
Automated quality-assured high-precision placement of unrollable materials
The adhesive film end effector is very compact and weighs only 75 kg. As such it can also be used on small robots in spatially restricted situations. It is able to cut, place, and press down double-sided adhesive tapes of any length from a few millimeters up to 50 meters onto flat, curved, and double curved surfaces.
This is achieved via a control circuit that applies a constant tension to the adhesive tape. This tension enables effective unrolling and precise placement of the adhesive tape. The operator only has to enter the desired tension on the control panel and then everything else takes place automatically. A user-friendly control panel was developed with self-explanatory images, so enabling even inexperienced operators to quickly learn how to control the system.
With slight modification the end effector can also be used for the precision placement of other types of materials on other component surfaces, provided these materials are on rolls. The placement accuracy is ±1 millimeter. In order to minimize the downtime when using the technology in industrial application, the entire path planning of the end effector is undertaken offline.
The measurement technology integrated into the adhesive film end effector precisely records the contact pressure, ambient temperature, air humidity, and many other parameters in order to monitor that conditions are optimal for the adhesive bonding process. This guarantees inline quality assurance.
Integration of 6 meter long stringers using cooperating robots
The current manual integration of 6 meter long stringers in aircraft production proved a challenge for automation in the project. Although stringers act as stiffening elements for aircraft, the fact that they deform critically if only held at one or two points created a challenge for an automated process. In addition, Z-profile stringers were used. These are not symmetrical around the center axis leading to twisting when being lifted. In order to take account of the deformation behavior, to grip a variety of stringer profiles, and to prospectively integrate even longer stringers it became clear that it was not possible to handle the stringers with just a single gripper. A system with two grippers was thus chosen, each fitted to its own robot. For the handling, one robot followed the path of the other robot at a defined distance. In order to avoid deformation of the stringer during handling, the path planning was carried out offline. A collision test was performed at the same time.
The grippers automatically adapt to the length as well as the thickness of the stringer and can grip stringers of differing geometries. With slight modification to the guide rollers almost all stringers can be integrated with the grippers. The heating of the adhesive film under the stringer, the contact pressure, and the integration speed can be varied as desired and are recorded during the entire process for quality assurance purposes. The grippers compensate unevenness in the stringers so ensuring integration within the force and temperature specifications.
Other R&D work in the „NFM-Glare“ sub-project
The experts for Adhesion and Interface Research as well as Plasma Technology and Surfaces at Fraunhofer IFAM in Bremen along with the Fraunhofer Institute for Material and Beam Technology IWS in Dresden have developed alternative pre-treatment techniques for sheet aluminum and new FML production processes.
Commissioning party
The three year „NFM-Glare“ project funded by the Federal Ministry for Economic Affairs and Energy recently ended (BMWi funding reference: 20W1517D).
http://www.ifam.fraunhofer.de/en/Profile/Locations/Stade


The majority of Earth’s water is unfit for human consumption since it is trapped in salty oceans. Although desalination plants are capable of turning saltwater into freshwater, they usually use a lot of energy. Scientists have now created a novel, sponge-like substance that effectively turns saltwater into drinkable water when combined with sunlight and a basic plastic cover. Their research, which was published in ACS Energy Letters, shows that an outdoor proof-of-concept that used just natural sunlight to successfully produce…

The scientific team led by Dr. Miloslav Polášek at IOCB Prague has come up with a technique to separate and purify rare earth elements (lanthanides). These are critical to industries ranging from electronics and medicine to automotive and defense. This novel method enables the extraction of metals like neodymium and dysprosium from used neodymium magnets. It is an important component in electric vehicles and wind turbines. Eco-Friendly and Solvent-Free Process Unlike conventional methods that rely on harsh chemicals and generate…

Inserting a nanometer-thin spacer in ExUC-OLEDs improves energy transfer, enhances blue light emission 77-fold, paving way for lightweight, low-voltage, and more flexible OLEDs Organic light-emitting diodes (OLEDs) have transformed display and lighting technology with their vivid colors, deep contrast, and energy efficiency. As demand grows for lighter, thinner, and more energy-saving devices—especially in wearables, foldables, and portable electronics—there’s increasing interest in OLEDs that can operate at lower voltages without compromising performance. A new type of OLEDs, known as exciplex upconversion…

Tokyo, Japan—The COVID-19 pandemic increased public awareness of the importance of mask use for personal protection. However, when the mesh size of mask fabrics is small enough to capture viruses, which are usually around one hundred nanometers in size, the fabric typically also restricts air flow, resulting in user discomfort. But now, researchers from Japan have found a way to avoid this. In a study published this month in Materials Advances, researchers from the Institute of Industrial Science, The University…




