











Feeding 9 Billion: Innovations in Agricultural Modeling
Researchers in Carnegie Mellon University’s Robotics Institute (RI) have designed a system that makes an off-the-shelf quadruped robot nimble enough to walk a narrow balance beam — a feat that is likely the first of its kind.
“This experiment was huge,” said Zachary Manchester, an assistant professor in the RI and head of the Robotic Exploration Lab. “I don’t think anyone has ever successfully done balance beam walking with a robot before.”
By leveraging hardware often used to control satellites in space, Manchester and his team offset existing constraints in the quadruped’s design to improve its balancing capabilities.
The standard elements of most modern quadruped robots include a torso and four legs that each end in a rounded foot, allowing the robot to traverse basic, flat surfaces and even climb stairs. Their design resembles a four-legged animal, but unlike cheetahs who can use their tails to control sharp turns or falling cats that adjust their orientation in mid-air with the help of their flexible spines, quadruped robots do not have such instinctive agility. As long as three of the robot’s feet remain in contact with the ground, it can avoid tipping over. But if only one or two feet are on the ground, the robot can’t easily correct for disturbances and has a much higher risk of falling. This lack of balance makes walking over rough terrain particularly difficult.
“With current control methods, a quadruped robot’s body and legs are decoupled and don’t speak to one another to coordinate their movements,” Manchester said. “So how can we improve their balance?”
The team’s solution employs a reaction wheel actuator (RWA) system that mounts to the back of a quadruped robot. With the help of a novel control technique, the RWA allows the robot to balance independent of the positions of its feet.
RWAs are widely used in the aerospace industry to perform attitude control on satellites by manipulating the angular momentum of the spacecraft.
“You basically have a big flywheel with a motor attached,” said Manchester, who worked on the project with RI graduate student Chi-Yen Lee and mechanical engineering graduate students Shuo Yang and Benjamin Boksor. “If you spin the heavy flywheel one way, it makes the satellite spin the other way. Now take that and put it on the body of a quadruped robot.”
The team prototyped their approach by mounting two RWAs on a commercial Unitree A1 robot — one on the pitch axis and one on the roll axis — to provide control over the robot’s angular momentum. With the RWA, it doesn’t matter if the robot’s legs are in contact with the ground or not because the RWAs provide independent control of the body’s orientation.
Manchester said it was easy to modify an existing control framework to account for the RWAs because the hardware doesn’t change the robot’s mass distribution, nor does it have the joint limitations of a tail or spine. Without needing to account for such constraints, the hardware can be modeled like a gyrostat (an idealized model of a spacecraft) and integrated into a standard model-predictive control algorithm.
The team tested their system with a series of successful experiments that demonstrated the robot’s enhanced ability to recover from sudden impacts. In simulation, they mimicked the classic falling-cat problem by dropping the robot upside down from nearly half a meter, with the RWAs enabling the robot to reorient itself mid-air and land on its feet. On hardware, they showed the robot’s ability to recover from disturbances — as well as the system’s balancing capability — with an experiment where the robot walked along a 6-centimeter-wide balance beam.
Manchester predicts that quadruped robots will soon transition from being primarily research platforms in labs to widely available commercial-use products, similar to where drones were about 10 years ago. And with continued work to enhance a quadruped robot’s stabilizing capabilities to match the instinctual four-legged animals that inspired their design, they could be used in high-stakes scenarios like search-and-rescue in the future.
“Quadrupeds are the next big thing in robots,” Manchester said. “I think you’re going to see a lot more of them in the wild in the next few years.”
To the team’s knowledge, this is the first instance of a quadruped successfully walking on a narrow balance beam. Their paper, “Enhanced Balance for Legged Robots Using Reaction Wheels,” was accepted to the 2023 International Conference on Robotics and Automation. The annual conference will be held May 29–June 2, in London.
Media Contact
Aaron Aupperlee
Carnegie Mellon University
aaupperlee@cmu.edu
Office: 412-268-9068

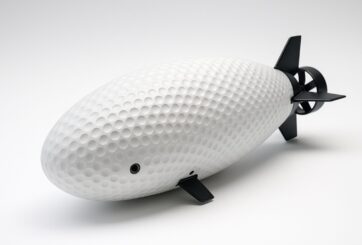
A spherical prototype that can change its surface from smooth to dimpled cuts through drag and generates lift Captions // Photos on Flickr // Video on Youtube Underwater or aerial vehicles with dimples like golf balls could be more efficient and maneuverable, a new prototype developed at the University of Michigan has demonstrated. Golf ball dimples cut through pressure drag—the resistance force an object meets when moving through a fluid—propelling the ball 30% further than a smooth ball on average….

In industrial stamping processes, several hundred sheet metal parts are typically produced per minute. Together with the stamped parts manufacturer Quittenbaum GmbH, researchers at Fraunhofer IPM have now for the first time developed and installed an optical inspection system that checks the dimensional accuracy of every single component in high-speed stamping processes – with an accuracy in the range of 100 micrometers. The geometric deviations are depicted in 16 different views on the user interface. © Fraunhofer IPM Connectors, sleeves…
A team of researchers has beaten its own record for the fastest swimming soft robot, drawing inspiration from manta rays to improve their ability to control the robot’s movement in the water. “Two years ago, we demonstrated an aquatic soft robot that was able to reach average speeds of 3.74 body lengths per second,” says Jie Yin, corresponding author of a paper on the work and an associate professor of mechanical and aerospace engineering at North Carolina State University. “We…
Detonation is a supersonic combustion wave, characterized by a shock wave driven by the energy release from closely coupled chemical reactions. It is a typical form of pressure gain combustion, converting chemical energy into thrust efficiently. The concept of harnessing detonation to improve thermodynamic cycle efficiency and enhance the performance of aerospace propulsion systems has been a subject of interest for many years. Since the 1950s, various types of detonation engines have been proposed, including pulse detonation engines, oblique detonation…
