From robotics to animal motor-control systems
Programmers of robots have long been challenged by the difficulty of implementing some of the simplest of human activities, such as walking up stairs or digging a ditch.
This is partially due to the versatility of human motor behavior in varying situations. Such robustness can be achieved with a functional hierarchy: a division of labor that allows complex motor behaviors to arise from simpler tasks that are connected at a higher level.
Previously, researchers had theorized that a connection of reusable sub-movements called motor primitives would be represented by spatially localized networks in the brain. Now, Yuichi Yamashita and Jun Tani from the RIKEN Brain Science Institute, Wako, have shown that the temporal characteristics of neurons in these motor networks may be just as critical to their functional hierarchy (1).
Yamashita and Tani took a synthetic approach to test their hypothesis that multiple timescales of activity could mediate motor organization. To this end, the scientists trained a robot to complete a set of distinct, but related, tasks. These motor behaviors included picking up a block to shake it side to side, picking up a block to shake it up and down, and touching the top of a block with one hand.
“It is generally thought that diverse behavior of an animal results from a functional hierarchy of the motor-control system,” explains Yamashita, where “motor primitives are flexibly integrated.” For example, the robot’s tasks could be executed by mixing and matching such primitives as making contact with an object, lifting it, and shaking it.
The key distinction in Yamashita and Tani’s work was that the hierarchical organization arose from multiple timescales in the network activity, rather than through spatial connections. The spatially based networks of previous studies consisted of isolated modules responding to each primitive in the lower levels, and gates to select and switch between primitives in the higher levels.
By contrast, the neural network of Yamashita and Tani’s robot comprised fast units, which could respond quickly to changing inputs, and slow units, which tended to avoid rapid fluctuations by relying on previous states. Based on the network activity, it appeared that the fast units had spontaneously organized to represent motor primitives, whereas the slow units resembled gates that ordered and activated the primitives. This discovery helps to explain the puzzling discrepancy between previous theories of spatially based motor organization and the elusive evidence of such spatial organization in the animal brain.
Reference
1. Yamashita, Y. & Tani, J. Emergence of functional hierarchy in a multiple timescale neural network model: A humanoid robot experiment. PLoS Computational Biology 4, e1000220 (2008).
The corresponding author for this highlight is based at the RIKEN Laboratory for Behavior and Dynamic Cognition
Media Contact
All latest news from the category: Interdisciplinary Research
News and developments from the field of interdisciplinary research.
Among other topics, you can find stimulating reports and articles related to microsystems, emotions research, futures research and stratospheric research.




Newest articles
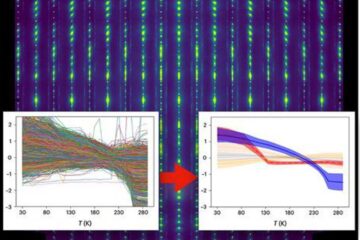
Machine learning algorithm reveals long-theorized glass phase in crystal
Scientists have found evidence of an elusive, glassy phase of matter that emerges when a crystal’s perfect internal pattern is disrupted. X-ray technology and machine learning converge to shed light…
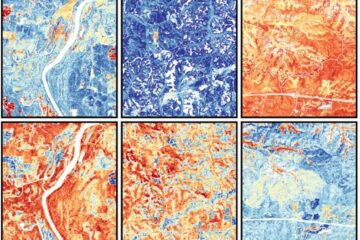
Mapping plant functional diversity from space
HKU ecologists revolutionize ecosystem monitoring with novel field-satellite integration. An international team of researchers, led by Professor Jin WU from the School of Biological Sciences at The University of Hong…

Inverters with constant full load capability
…enable an increase in the performance of electric drives. Overheating components significantly limit the performance of drivetrains in electric vehicles. Inverters in particular are subject to a high thermal load,…

