What can I, Robot, do with that?
But there is another radically different approach available that European researchers have applied to the study of robotics and AI. The MACS project does not attempt to get robots to perceive what something is, but how it can be used.
This is an application of the cognitive theory of ‘affordances’, developed by the American psychologist James J. Gibson between 1950 and 1979. He rejected behaviourism and proposed a theory of ‘affordances’, a term signifying the range of possible interactions between an individual and a particular object or environment. The theory focuses on what a thing or environment enables a user to do.
Computer vision might identify the object as a chair, but a system of affordances will instruct the robot that it can be used for sitting. This system is key to the new approach. The system means that once an affordance-perceiving robot ‘sees’ a flat object of a certain height and rigidity, it knows that the object can be used for sitting.
But it also means that an affordance-based robot will be able to determine that the flat object of a certain height and rigidity is too heavy to lift, and must be pushed, and that it can be used to hold a door open.
Ultimately, the aim of goal-oriented, affordance-based machine cognition is to enable a robot to use whatever it finds in its environment to complete a particular task.
“Affordance based perception would look at whether something is graspable, or if there is an opening, rather than worrying about what an object is called,” explains Dr Erich Rome, coordinator of the MACS project.
Five ambitious goals
‘MACS’ stands for multi-sensory autonomous cognitive systems interacting with dynamic environments for perceiving and learning affordances. Started in September 2004, the project began with five scientific and technological goals.
First the researchers sought to create new software architecture to support affordance-based robot control. Second, they wanted to use affordances to direct a robot to complete a goal-directed task. Third, they wanted to establish methods for perceiving, learning and reasoning about affordances.
Next, they wanted to create a system so the robot could acquire knowledge of new affordances through experimentation or observation. Finally the MACS team planned to demonstrate the entire system on a robotic platform called the Kurt3D.
The EU-funded project successfully created an integrated affordance-inspired robot control system. This included the implementation of a perception module, a behaviour system, an execution control module, planner, learning module and affordance representation repository.
The proof-of-concept has been shown in various experiments with the simulator MACSim and in the real robot Kurt3D.
“We performed a physics-based simulation using a model of the robot,” says Rome. We tested single components like perception and learning, and also the entire architecture in simulation. And then we tested the whole system in the robot.”
In that test, Kurt3D used affordance-based perception to identify what could be grasped, where there was free space, and what was traversable. The robot found an object, picked it up, and put it on a pressure-activated switch that controlled a door. Then, once the robot detected the passage, it opened and moved through the door.
The robot improvises
The tests were a remarkable achievement. The robot essentially figured out how to manipulate its environment to achieve a real-world goal. It showed a capacity for improvisation.
“This is the very early stages of this approach,” warns Rome. “So we are a long way from commercialisation. There are others working on it. But what is unique about the MACS project is that we introduced direct support for the affordances concept in our architecture.”
And MACS has also made affordances a more mainstream concept in robotics, perception and cognition. Some of the partners are involved in other projects, like ROSSI, which tracks the relation of language to actions (http://www.rossiproject.eu).
“The project helped generate a lot of interest in the concept and it is also now a very visible topic,” says Rome.
In all, MACS and its work have moved robotics into a new paradigm, teaching robots to identify what they can do.
Media Contact
All latest news from the category: Information Technology
Here you can find a summary of innovations in the fields of information and data processing and up-to-date developments on IT equipment and hardware.
This area covers topics such as IT services, IT architectures, IT management and telecommunications.




Newest articles

Properties of new materials for microchips
… can now be measured well. Reseachers of Delft University of Technology demonstrated measuring performance properties of ultrathin silicon membranes. Making ever smaller and more powerful chips requires new ultrathin…

Floating solar’s potential
… to support sustainable development by addressing climate, water, and energy goals holistically. A new study published this week in Nature Energy raises the potential for floating solar photovoltaics (FPV)…
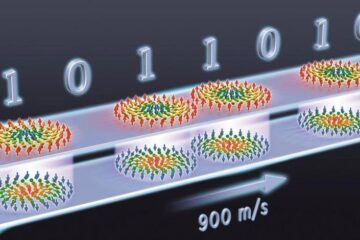
Skyrmions move at record speeds
… a step towards the computing of the future. An international research team led by scientists from the CNRS1 has discovered that the magnetic nanobubbles2 known as skyrmions can be…

