Interactive simulator for vehicle drivers
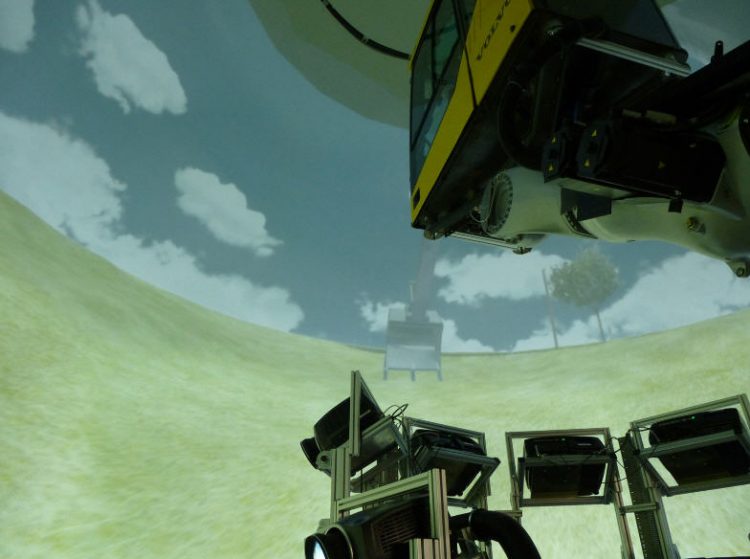
Almost like real life: the vehicle simulator at Fraunhofer ITWM has 18 projectors that throw their images up on a huge dome. The vehicle interior can simulate nearly every driving situation. © Fraunhofer ITWM
Simulations are an important development tool in the automobile and utility vehicle industries – they enable engineers to see into the future. The properties of vehicle components, such as how they respond in an accident, their reliability, or their energy efficiency can be investigated using simulations before the first component is manufactured.
To continue to maintain the prediction power of the results, however, all of the influences that the vehicle is exposed to later on in actual operation must be taken into account – including those of drivers and operators.
Researchers at the Fraunhofer Institute for Industrial Mathematics ITWM in Kaiserslautern, Germany, have developed an interactive driving simulator using RODOS (robot-based driving and operation simulator) with which realistic interaction between human and vehicle can be analyzed. “Driving behavior is a key factor that is often insufficiently accounted for in computational models,” according to Dr. Klaus Dreßler of ITWM.
No doubt there are algorithms that are supposed to represent the “human factor” in simulations – however, these do not properly reflect the complexity of human behavior. For this reason, researchers at ITWM have shifted to a hybrid design for simulation. Hybrid here means a real person interacts with a simulation environment – a well-known example of this is a flight simulator, in which pilots regularly practice extreme situations.
In the automotive and utility-vehicle sector, only a few manufacturers have had this kind of facility at their disposal, as its development involves a lot of effort and expense.
An enormous industrial robot manipulator simulates braking maneuvers
The simulation facility’s structure at ITWM consists of a real vehicle interior where the test driver can operate the steering wheel, accelerator, and brakes as usual. The vehicle interior is integrated into a 6-axis robotic system that looks like a gigantic gripper arm and can simulate acceleration, braking, or tight curves by leaning and rotating. “We have much greater room to maneuver than with the kinematic systems usually employed today. At the same time, the space requirements are comparatively quite low,” according to project manager Michael Kleer.
For test drivers to behave authentically, they must have the feeling they are actually situated in a moving vehicle. If movements of the simulator do not match the visual impressions, this not only influences driver reactions, it can also lead to symptoms like kinetosis. Simulator sickness is triggered by contradictory sensory perceptions, the same way motion sickness or sea sickness is.
“To prevent these unpleasant side effects, we have developed our motion cueing algorithms that generate the control signals for the robot in close cooperation with researchers in cognition,” explains Dreßler. On the basis of this interdisciplinary knowledge, the motions of the simulator can be matched to visual input so they are perceived as very natural by the test drivers. At the same time, an enormous projection dome provides the external impression of real driving. 18 projectors provide a realistic 300 degree view of the situation for the driver. “You can imagine it as resembling an IMAX theater,” according to Dreßler.
Driving simulations that also take into account the human effects on a vehicle may become more important in future. The increasing number of driver assistance systems will themselves make the human-machine interface in automobiles increasingly important. The demands placed on simulations will thus become increasingly more specific. “That is where we have an additional advantage with our approach: all the algorithms are proprietary in-house developments – so we therefore can match the individual algorithm parameters to project-specific problems,” says Kleer.
The simulation facility at ITWM has been in operation since July 2013 – and two projects in collaboration with the Volvo Construction Equipment company are presently underway. From April 7 to 11 the technology will be shown at the Hannover Messe trade fair (Hall 7, Booth B10).
Media Contact
All latest news from the category: Trade Fair News




Newest articles
Silicon Carbide Innovation Alliance to drive industrial-scale semiconductor work
Known for its ability to withstand extreme environments and high voltages, silicon carbide (SiC) is a semiconducting material made up of silicon and carbon atoms arranged into crystals that is…
New SPECT/CT technique shows impressive biomarker identification
…offers increased access for prostate cancer patients. A novel SPECT/CT acquisition method can accurately detect radiopharmaceutical biodistribution in a convenient manner for prostate cancer patients, opening the door for more…
How 3D printers can give robots a soft touch
Soft skin coverings and touch sensors have emerged as a promising feature for robots that are both safer and more intuitive for human interaction, but they are expensive and difficult…

