Control of parallel-kinematic machines
This novel modelling processing now allows an efficient description and drive of parallel-kinematic machines by means of a universal procedure, and forms the basis for the differentiation of the system of equations in terms of control. The links of the said mechanisms are incorporated into local co-ordinate systems in order to display their coupling in non-linear algebraic equations. The system of equation solution displays the possibilities of moving of the said links and enables the control of the kinematics.
Further Information: PDF
IMG Innovations-Management GmbH
Phone: +49 (0)631/31668-0
Contact
Dr. Klaus Kobek
Media Contact
All latest news from the category: Technology Offerings
Newest articles

Bringing bio-inspired robots to life
Nebraska researcher Eric Markvicka gets NSF CAREER Award to pursue manufacture of novel materials for soft robotics and stretchable electronics. Engineers are increasingly eager to develop robots that mimic the…

Bella moths use poison to attract mates
Scientists are closer to finding out how. Pyrrolizidine alkaloids are as bitter and toxic as they are hard to pronounce. They’re produced by several different types of plants and are…
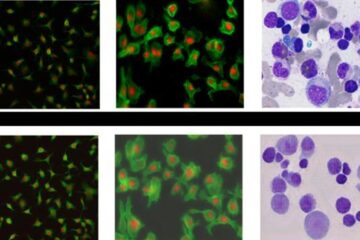
AI tool creates ‘synthetic’ images of cells
…for enhanced microscopy analysis. Observing individual cells through microscopes can reveal a range of important cell biological phenomena that frequently play a role in human diseases, but the process of…

