Researcher designs robot that jumps like a grasshopper
The ‘Jollbot’ has been created by Rhodri Armour, a PhD student from the University of Bath. It’s hoped his creation, which can jump over obstacles and roll over smoother terrain, could be used for space exploration or land survey work in the future.
One of the major challenges that face robots designed for space exploration is being able to move over rough terrain. Robots with legs are generally very complex, expensive to build and control, and encounter problems if they fall over. Wheels are a simpler solution to this, but are limited by the size of obstacles they can overcome.
To solve the problem, Rhodri and colleagues in the University’s Centre for Biomimetic & Natural Technologies have been looking to nature for inspiration – designing a robot that jumps obstacles in its path like an insect.
The ‘Jollbot’ is shaped like a spherical cage which can roll in any direction, giving it the manoeuvrability of wheels without the problem of overturning or getting stuck in potholes.
The robot is also flexible and small, weighing less than a kilogramme, meaning it’s not damaged when landing after jumping and is therefore less expensive than conventional exploration robots.
Mr Armour explained:”Others in the past have made robots that jump and robots that roll; but we’ve made the first robot that can do both.
“In nature there are two main types of jumping: hopping, like a kangaroo, which uses its fine control and direct muscle action to propel it along; and ‘pause and leap’, such as in a grasshopper, which stores muscle energy in spring-like elements and rapidly releases it to make the jump.
“We’ve made a robot that jumps in a similar way to the grasshopper, but uses electrical motors to slowly store the energy needed to leap in its springy skeleton.
“Before jumping, the robot squashes its spherical shape. When it is ready, it releases the stored energy all at once to jump to heights of up to half a metre.”
Mr Armour, who has just submitted his PhD thesis, took measurements using a high speed camera to analyse how the robot jumped and to predict how it might behave in a low-gravity environment, such as in space.
He added: “Future prototypes could include a stretchy skin covered in solar cells on the outside of the robot, so it could power itself, and robotic control sensors to enable it to sense its environment.”
The components of the robot were made by rapid prototyping technology, similar to that used by the RepRap machine pioneered by the University, which builds parts by “printing” layers of plastic on top of each other to produce a 3D object.
Media Contact
All latest news from the category: Physics and Astronomy
This area deals with the fundamental laws and building blocks of nature and how they interact, the properties and the behavior of matter, and research into space and time and their structures.
innovations-report provides in-depth reports and articles on subjects such as astrophysics, laser technologies, nuclear, quantum, particle and solid-state physics, nanotechnologies, planetary research and findings (Mars, Venus) and developments related to the Hubble Telescope.




Newest articles

Bringing bio-inspired robots to life
Nebraska researcher Eric Markvicka gets NSF CAREER Award to pursue manufacture of novel materials for soft robotics and stretchable electronics. Engineers are increasingly eager to develop robots that mimic the…

Bella moths use poison to attract mates
Scientists are closer to finding out how. Pyrrolizidine alkaloids are as bitter and toxic as they are hard to pronounce. They’re produced by several different types of plants and are…
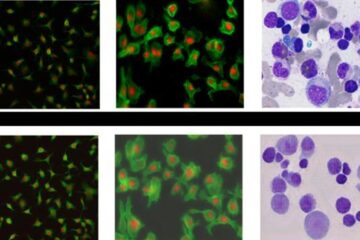
AI tool creates ‘synthetic’ images of cells
…for enhanced microscopy analysis. Observing individual cells through microscopes can reveal a range of important cell biological phenomena that frequently play a role in human diseases, but the process of…

