Your robotic friend, the humanoid robot
In Europe, as the rest of the world, there is s surge in robotics research, reflected in part by the European Network of Robotic Research (EURON), an EU-funded network of excellence that completed its work in 2008.
It was an important network. Observers like Bill Gates believe that there will be a robot in every home by 2025, and they compare the current state of play to the early days of the personal computer in the 1970s. The dozens of research programmes united by EURON represent the state-of-the-art in robotics, and a glimpse of the future.
At first blush, the humanoid robots in the EURON network (see related articles) do not necessarily make a lot of sense. They are seriously difficult to design and implement. For robots with legs, for example, there are enormous problems with balance, movement and safety.
And some would argue they are even an extravagance, given that a robot can be any shape that will allow it to best perform its function. Yet researchers and designers remain fascinated by the allure of the mechanical friend, the humanoid robot.
It is also surprising for cultural reasons. “Generally speaking, Europeans and Americans prefer their robots to look like machines, they do not like the ambiguity of a robot that looks like a person,” explains Bruno Siciliano, a robotics researcher.
“The Japanese, on the other hand, are very comfortable with humanoid robots, and I think it is something to do with the Shinto religion that believes machines can have a soul,” he says.
But for all the cultural resistance, humanoid robotics do play an important role in European research, and not just because they look cute.
“Humanoid designs, especially ones that walk, pose enormous design and engineering challenges, and that in itself is a good reason do develop them, because they advance the field as a whole,” suggests Siciliano who is dissemination officer of EURON.
Even better, a robust and reliable humanoid design would find it much easier to operate in a world designed for humans, where steps, gradients, variable terrain and corners abound.
Some robot friends
Reem-A, a life-size humanoid robot can recognise casual questions and commands, hold simple objects and stop for obstacles in its path during a leisurely stroll. It has sturdy legs, designed for stability, and it won a race at RoboCup 2006, a sort of robot Olympics. It can even play chess.
ARMAR is more of a geeky housemate, working in the kitchen at tasks like opening the dishwasher door, filling it with dirty dishes and then closing the door before turning the machine on. Granted, this is something humans can do much easier, but it is a significant step on the road to complete automation of daily and in many cases disagreeable chores.
Maggie was designed by the University Carlos III in Madrid to be a sociable robot. It has a friendly, almost cartoon frog-like appearance and can talk and recognise speech. It tries to understand gestures and touch through a touch screen on its chest. With a little prompting, it will even dance.
The same research team is also responsible for RH1, a rather chubby precursor to C3PO, the robot made famous by Star Wars. RH1 can change its gait to adapt to walking indoors or outside, and it can co-operate with people and other robots in real collaborative environments.
Learning hard lessons
Casimiro is another robot, though not mobile, designed for social interactions. Here, the researchers have focused on the face, teaching the robot to respond to people with a range of expressions. It is a fascinating area of research because engineers at the University of Las Palmas in Gran Canaria have found that they can get realistic interactions in the testing and teaching phase. But reliability over time is a challenge.
Because what is easy for people, like social intelligence, is hard for robots. Researchers at Las Palmas believe it is because we acquire social intelligence unconsciously, as children, that we find it very hard to create a series of protocols or algorithms that can be easily applied to a robot.
Physical manipulation is something we do consciously, however, so that is easy to translate into robotic terms. It is just one of the fascinating insights into both human and robotic intelligence that this research reveals.
The obvious, immediate applications for friendly robots are still evolving, but it is already clear that they have enormous implications for the future acceptance of humanoid machines in the home. “There is a huge amount of research on social robots currently underway in Japan and even in the USA,” notes Siciliano.
Ultimately, with enough sophistication, social robots will be able to act as a comforting, animated presence for children or the elderly, combining the roles of companion with that of assistant.
Another robot, Justin, may be an early precursor of that type of robot. It is an incredibly sophisticated platform with enormous dexterity and it is even capable of making coffee.
“Japanese researchers familiar with Justin believe it is the most sophisticated European platform to date,” notes Siciliano. “It shows what Europe is capable of in this domain.”
Many of these robots have been funded through a variety of EU programmes. All of them benefited from networking.
This is part two of a special series of features exploring European robotics research, from humanoids friends, to functional home help, to just plain odd-bots.
Media Contact
All latest news from the category: Information Technology
Here you can find a summary of innovations in the fields of information and data processing and up-to-date developments on IT equipment and hardware.
This area covers topics such as IT services, IT architectures, IT management and telecommunications.




Newest articles
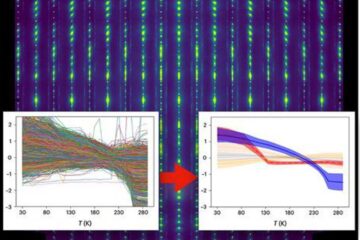
Machine learning algorithm reveals long-theorized glass phase in crystal
Scientists have found evidence of an elusive, glassy phase of matter that emerges when a crystal’s perfect internal pattern is disrupted. X-ray technology and machine learning converge to shed light…
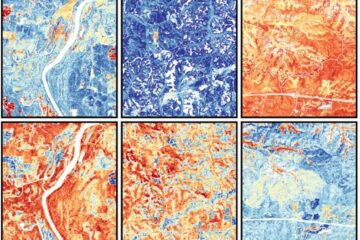
Mapping plant functional diversity from space
HKU ecologists revolutionize ecosystem monitoring with novel field-satellite integration. An international team of researchers, led by Professor Jin WU from the School of Biological Sciences at The University of Hong…

Inverters with constant full load capability
…enable an increase in the performance of electric drives. Overheating components significantly limit the performance of drivetrains in electric vehicles. Inverters in particular are subject to a high thermal load,…

