‘Honeybee’ robots replicate swarm behaviour
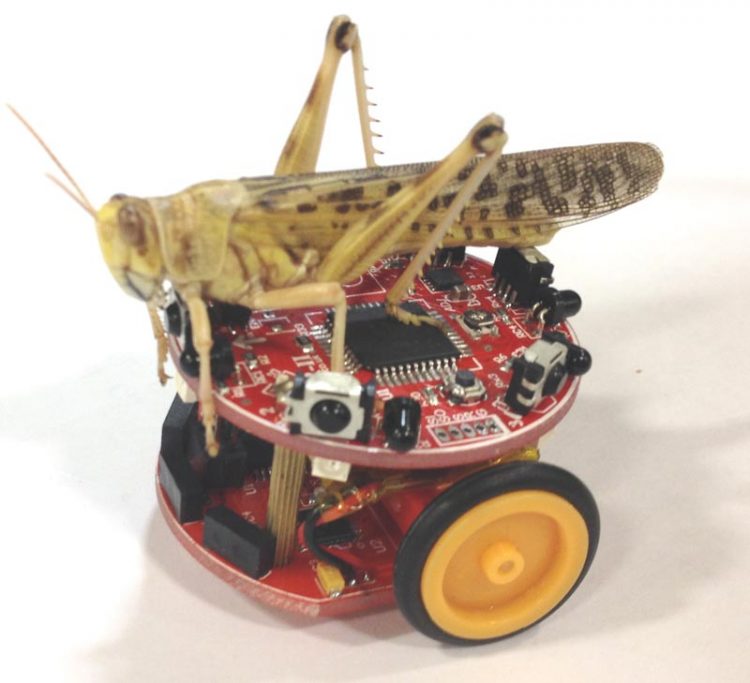
Colias – named after a genus of butterfly – is an open-platform system that can be used to investigate collective behaviours and be applied to swarm applications.
Robotic swarms that take inspiration from nature have become a topic of fascination for robotics researchers, whose aim is to study the autonomous behaviour of large numbers of simple robots in order to find technological solutions to common complex tasks.
Due to the hardware complexities and cost of creating robot hardware platforms, current research in swarm robotics is mostly performed by simulation software. However, the simulation of large numbers of these robots in robotic swarm software applications is often inaccurate due to the poor modelling of external conditions.
Colias was created by a team of scientists led by the University of Lincoln, UK, with Tsinghua University in China. It has been proven to be feasible as an autonomous platform – effectively replicating a honeybee swarm. Its small size (4cm diameter) and fast motion (35cm/s) means it can be used in fast-paced swarm scenarios over large areas.
In comparison to other mobile robots which are utilized in swarm robotic research, Colias is a low-cost platform, costing around £25, making the replication of swarm behaviour in large numbers of robots more feasible and economical for researchers.
Farshad Arvin, from the School of Computer Science, University of Lincoln, was part of the research team which developed Colias.
He said: “The platform must be able to imitate swarm behaviours found in nature, such as insects, birds and fish. Colias has been designed as a complete platform with supporting software development tools for robotics education and research. This concept allows for the coordination of simple physical robots in order to cooperatively perform tasks. The decentralised control of robotic swarms can be achieved by providing well-defined interaction rules for each individual robot. Colias has been used in a bio-inspired scenario, showing that it is extremely responsive to being used to investigate collective behaviours. Our aim was to imitate the bio-inspired mechanisms of swarm robots and to enable all research groups, even with limited funding, to perform such research with real robots.”
Long-range infrared proximity sensors allow the robot to communicate with its direct neighbours at a range of 0.5cm to 2m. A combination of three short-range sensors and an independent processor enables the individual robots to detect obstacles.
A similar but more complex mechanism has been found in locust vision, where a specific neuron called the ‘lobula giant movement detector’ reacts to objects approaching the insects’ eyes.
Co-author Professor Shigang Yue, also from Lincoln’s School of Computer Science, previously created a computerised system which supports the autonomous navigation of mobile robots based on the locust’s unique visual system.
This earlier research, published in the International Journal of Advanced Mechatronic Systems (2013), could provide the blueprint for the development of highly accurate vehicle collision sensors, surveillance technology and even aid video game programming.
The next step for the Colias research team is to work on an extension of the vision module using a faster computer processor to implement bio-inspired vision mechanisms.
Full details of their research have been published in the International Journal of Advanced Robotic Systems.
The work is supported by the European Union’s FP7 project EYE2E, which aims to build international capacity and cooperation in the field of biologically inspired visual neural systems.
A video showing the swarming behaviour of Colias robots can be found at: http://youtu.be/xEvWU9FexGU
Full bibliographic informationFarshad Arvin, John Murray, Chun Zang, Shigang Yue ‘Colias: An autonomous micro robot for swarm robotic applications’ International Journal of Advanced Robotic Systems
DOI: 10.5772/58730http://cdn.intechopen.com/pdfs-wm/47293.pdf
Media Contact
More Information:
http://www.lincoln.ac.ukAll latest news from the category: Information Technology
Here you can find a summary of innovations in the fields of information and data processing and up-to-date developments on IT equipment and hardware.
This area covers topics such as IT services, IT architectures, IT management and telecommunications.




Newest articles
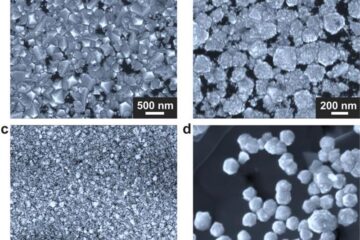
Making diamonds at ambient pressure
Scientists develop novel liquid metal alloy system to synthesize diamond under moderate conditions. Did you know that 99% of synthetic diamonds are currently produced using high-pressure and high-temperature (HPHT) methods?[2]…
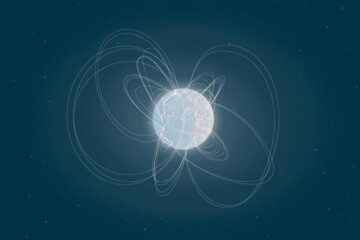
Eruption of mega-magnetic star lights up nearby galaxy
Thanks to ESA satellites, an international team including UNIGE researchers has detected a giant eruption coming from a magnetar, an extremely magnetic neutron star. While ESA’s satellite INTEGRAL was observing…
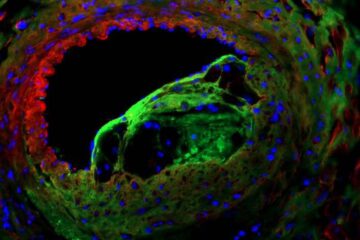
Solving the riddle of the sphingolipids in coronary artery disease
Weill Cornell Medicine investigators have uncovered a way to unleash in blood vessels the protective effects of a type of fat-related molecule known as a sphingolipid, suggesting a promising new…

