2nd Conference on Non-Textual Information on 10 and 11 May 2017 in Hannover

conference banner TIB
The Technische Informationsbibliothek (TIB) – German National Library of Science and Technology is organising the Second Conference on Non-Textual Information under the title “Software and Services for Science (S3)” in Hannover on 10 and 11 May 2017.
The conference focuses on sustainability, referencing scientific software, trends in programming practice, software sharing and legal aspects.
The English-language conference offers a forum where infrastructure facilities can share information about the requirements, expectations and needs concerning scientific software in practice.
TIB is hosting the Second Conference on Non-Textual Information in collaboration with its partners ZB MED – Information Centre for Life Sciences and ZBW – Leibniz Information Centre for Economics.
L3S Research Centre will support the conference in the area of programme planning.
More information: http://www.nontextualinformation2017.de
Date: 10 and 11 May 2017
Venue: Leibnizhaus Conference Centre in Hannover
https://www.tib.eu/en – More information about the Technische Informationsbibliothek (TIB) – German National Library of Science and Technology
http://www.nontextualinformation2017.de – More information about the conference “Software and Services for Science (S3)”
Media Contact
All latest news from the category: Event News




Newest articles
Silicon Carbide Innovation Alliance to drive industrial-scale semiconductor work
Known for its ability to withstand extreme environments and high voltages, silicon carbide (SiC) is a semiconducting material made up of silicon and carbon atoms arranged into crystals that is…
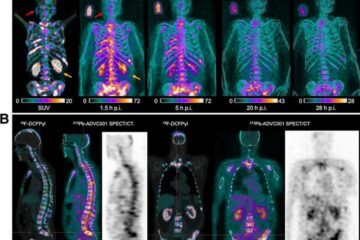
New SPECT/CT technique shows impressive biomarker identification
…offers increased access for prostate cancer patients. A novel SPECT/CT acquisition method can accurately detect radiopharmaceutical biodistribution in a convenient manner for prostate cancer patients, opening the door for more…
How 3D printers can give robots a soft touch
Soft skin coverings and touch sensors have emerged as a promising feature for robots that are both safer and more intuitive for human interaction, but they are expensive and difficult…

