Cornell’s Robotic Ranger Smashes World Record by Strolling 40.5 Miles – at a Fleet 1.3 Mph Pace
Ranger, a bipedal robot built and programmed in Cornell’s Biorobotics and Locomotion lab, led by Andy Ruina, professor of mechanical and aerospace engineering, started walking on Cornell’s Barton Hall track on May 1 just after 2 p.m., and then came to an abrupt stop at on May 2 at 9 p.m., after 30 hours, 49 minutes and 2 seconds of nonstop walking. It covered the 307.75 laps (0.13 miles per lap) at a 1.3 mph amble.
To warm up for the feat, Ranger – donating a participation fee – walked 30 laps in the American Cancer Society’s Relay for Life charity event at Cornell University on April 30.
Ranger’s previous record was 14.3 miles, set last July. Before that, Boston Dynamics’ Bigdog, a four-legged, all-terrain robot, trotted 12.8 miles without refueling. The new Cornell goal was to have a robot walk a full marathon (26.2 miles) without recharge, which Ranger did in just over 20 hours – and then it kept going … and going. In contrast, at the much-publicized world’s first robot marathon in Osaka, Japan in February, robots were repeatedly recharged.
“We were getting pretty tired by the end,” said Violeta Juarez Crow ’12, an electrical engineering major who steered the robot for dozens of laps around the Barton track.
The overall goal of the National Science Foundation-funded research project is to understand walking by reinventing it, said Ruina.
Ranger has six small on-board computers executing about 10,000 lines of computer code. The programs run in a repeating loop every 1/500th of a second. The robot also has dozens of electrical and mechanical sensors. The electronics used 4.7 watts.
“It took a bit of effort to keep the computation, sensing and communication energy use low,” said Jason Cortell, a research support specialist who designed most of the electronics on Ranger. “We hope to use what we have developed for more complex robots.”
The robot’s total weight is 22 pounds, of which 6 pounds are the lithium-ion batteries that power the electronics and the motors. One of these motors extends the outer ankles, another extends the inner ankles and a third swings the legs. A fourth smaller motor twists the inner legs for steering. The motors consume an additional 11.3 watts. At 16 watts total, the specific cost of transport (COT, energy per unit weight per unit distance) was a relatively stingy 0.28 joules per newton-meter. Most robots use much more energy (with a typical COT of 1.5 or more), Ruina said. Ranger still isn’t as efficient as a typical human, who walks with a COT of about 0.2.
Ranger’s present COT of 0.28 is less than its COT last summer of 0.49.
“We’ve improved the control in various ways since then,” said Pranav Bhounsule, the graduate student in charge of the control system. “But I think we can still do better.”
While most legged robots achieve stability by carefully controlling all of the joint angles in their bodies, Ranger achieves its low energy use by, as much as possible, letting the legs swing as they will, Ruina explained. Also, most bipedal robots stand on flat feet. Ranger can’t stand upright at all; instead, it balances by falling and catching itself at each step. The trick is to make the catch at the right time and place.
Ruina said: “Our challenge is to lower the energy use while still maintaining balance. The achievement is to have gone 186,076 steps on 5 cents worth of electricity, and without falling down. … If we try for another record, it will be with automatic steering.”
Media Contact
More Information:
http://www.cornell.eduAll latest news from the category: Power and Electrical Engineering
This topic covers issues related to energy generation, conversion, transportation and consumption and how the industry is addressing the challenge of energy efficiency in general.
innovations-report provides in-depth and informative reports and articles on subjects ranging from wind energy, fuel cell technology, solar energy, geothermal energy, petroleum, gas, nuclear engineering, alternative energy and energy efficiency to fusion, hydrogen and superconductor technologies.



Newest articles

Bringing bio-inspired robots to life
Nebraska researcher Eric Markvicka gets NSF CAREER Award to pursue manufacture of novel materials for soft robotics and stretchable electronics. Engineers are increasingly eager to develop robots that mimic the…

Bella moths use poison to attract mates
Scientists are closer to finding out how. Pyrrolizidine alkaloids are as bitter and toxic as they are hard to pronounce. They’re produced by several different types of plants and are…
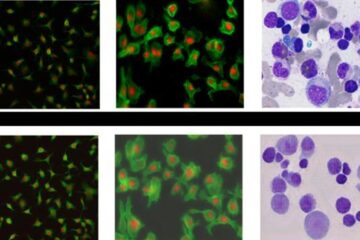
AI tool creates ‘synthetic’ images of cells
…for enhanced microscopy analysis. Observing individual cells through microscopes can reveal a range of important cell biological phenomena that frequently play a role in human diseases, but the process of…

